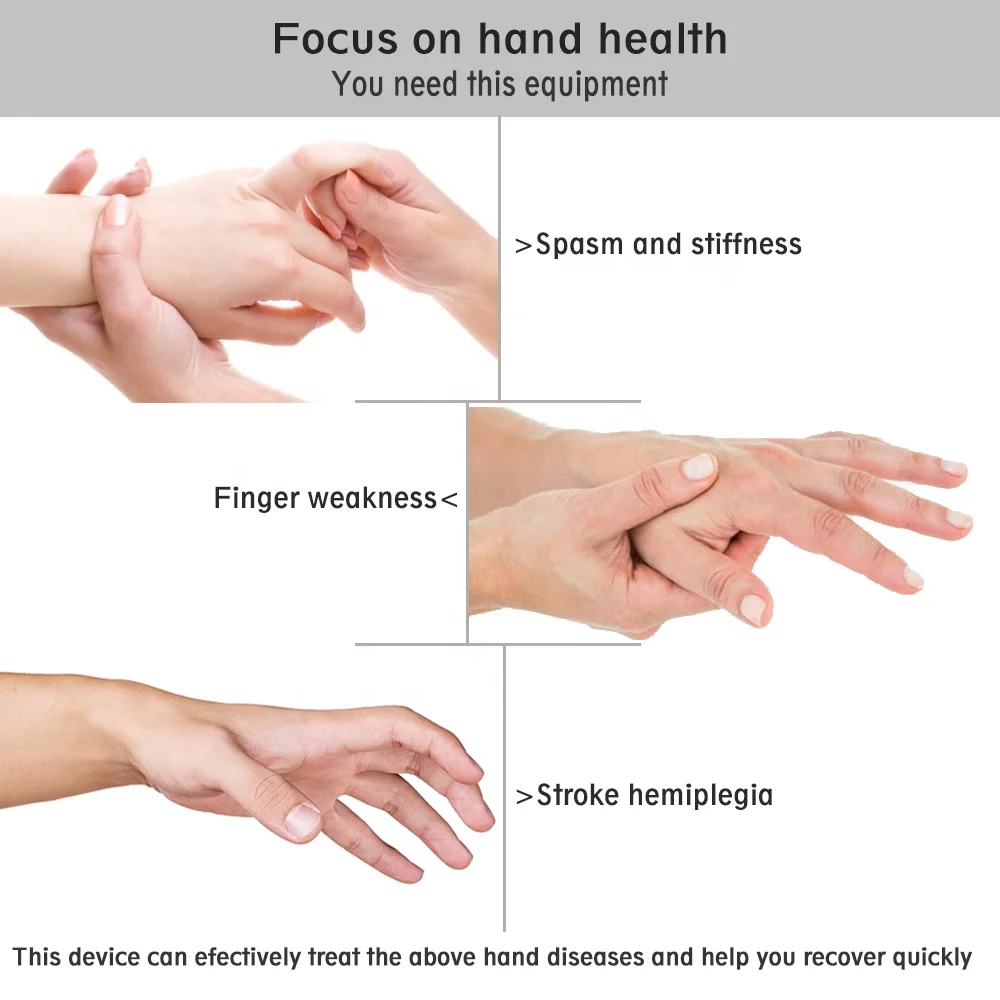
Questo robot di riabilitazione manuale per la terapia fisica, progettato appositamente per pazienti colpiti da ictus, innovativamente integra le due funzioni di movimento attivo e massaggi passivi. Monitora in tempo reale l'ampiezza di movimento delle articolazioni delle dita attraverso sensori precisi e fornisce un addestramento con resistenza progressiva combinato con dispositivi pneumatici flessibili. Per sintomi come spasmi alle mani e debolezza nella presa dopo una emiplegia, è possibile simulare le tecniche dei terapisti professionisti per eseguire massaggi su punti di acupressione della mano intera e stiramenti delle articolazioni interfalangiche. La verifica clinica mostra che l'uso continuativo può migliorare significativamente la circolazione sanguigna delle mani, alleviare la rigidità muscolare, aumentare la capacità di svolgere attività quotidiane e fornire una soluzione efficiente e sicura per scenari di riabilitazione domestica.
Macchina per gli esercizi per pazienti ictus, attrezzatura per la riabilitazione della mano, terapia di massaggio completo per la mano |
||||||||
Numero di modello |
FR01/Dispositivo per la riabilitazione della mano ricaricabile |
|||||||
Set Incluso |
1 dispositivo+1 guanto di recupero+1 guanto specchio+1 guanto massaggio |
|||||||
Dimensione del dispositivo |
20,6*14,6*8,5cm |
|||||||
Consumo di energia |
22W |
|||||||
Capacità della batteria |
6000mAh |
|||||||
Tempo di trattamento |
5~60 minuti |
|||||||
Programmi |
4 tipi Massaggio ad aria/Allenamento passivo/Allenamento speculare/Allenamento singolo dito
|
|||||||
Intervallo di Pressione |
100-180mmHg |
|||||||
In grado di impostare il tempo desiderato da 1 a 9 secondi per l'estensione e la flessione individualmente |
in grado di impostare il tempo desiderato da 1 a 9 secondi per l'estensione e la flessione individualmente |
|||||||